研究概要
私たちは普段,手でスマホを触ったり,足で自転車を漕いだりしています. しかし,もし明日から自分の手足が使えなくなったらどうすればよいでしょうか.
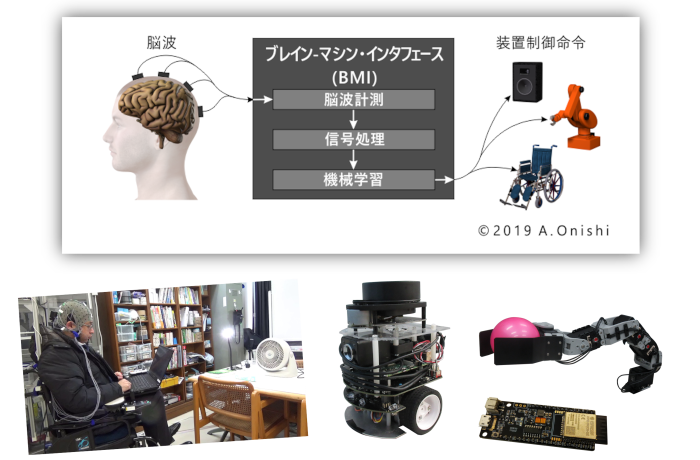
その解決方法の一つに,手足以外の残存機能を使う方法があります. 例えば首の動き,視線,音声,筋電,脳波などを機器制御命令に変換する技術です.
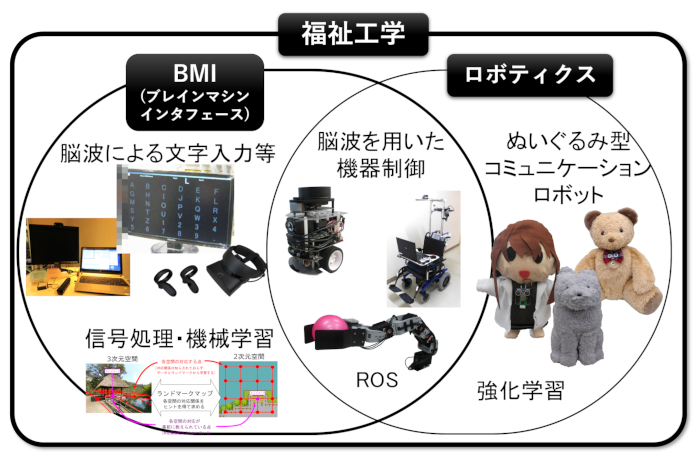
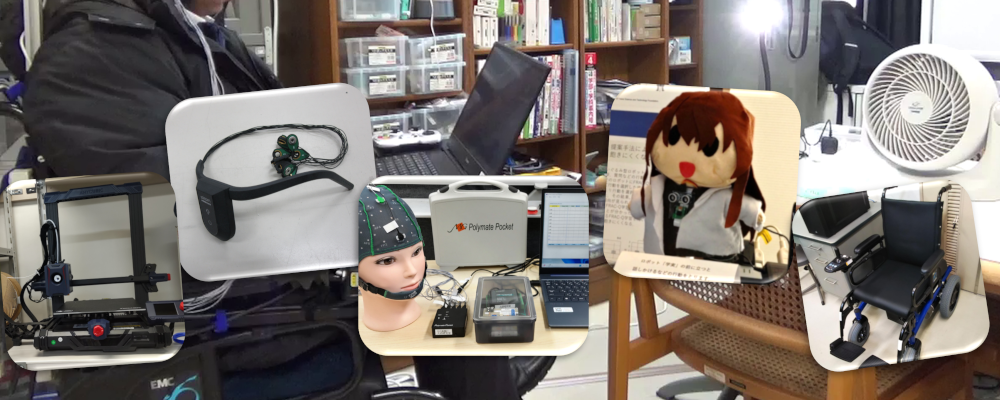
私は「人間と機械をつなぐ」ことをテーマした福祉工学に関する研究をしています. 特に脳波を機器制御命令に変換するブレイン-マシン・インタフェース(BMI/BCI)の研究に重点的に取り組んでいます. これまでBMIに用いる刺激の評価や,脳波をより正確に読み取るための機械学習(ディープラーニングなど)に関する研究, BMIを用いてロボットを制御する研究を行ってきました.近年,独居老人や留守番中の子供のためのコミュニケーションロボットに関する研究を立ち上げました. 今後はこれまで培った知見を生かし,様々な福祉機器の開発などへと発展させていきたいと考えております.